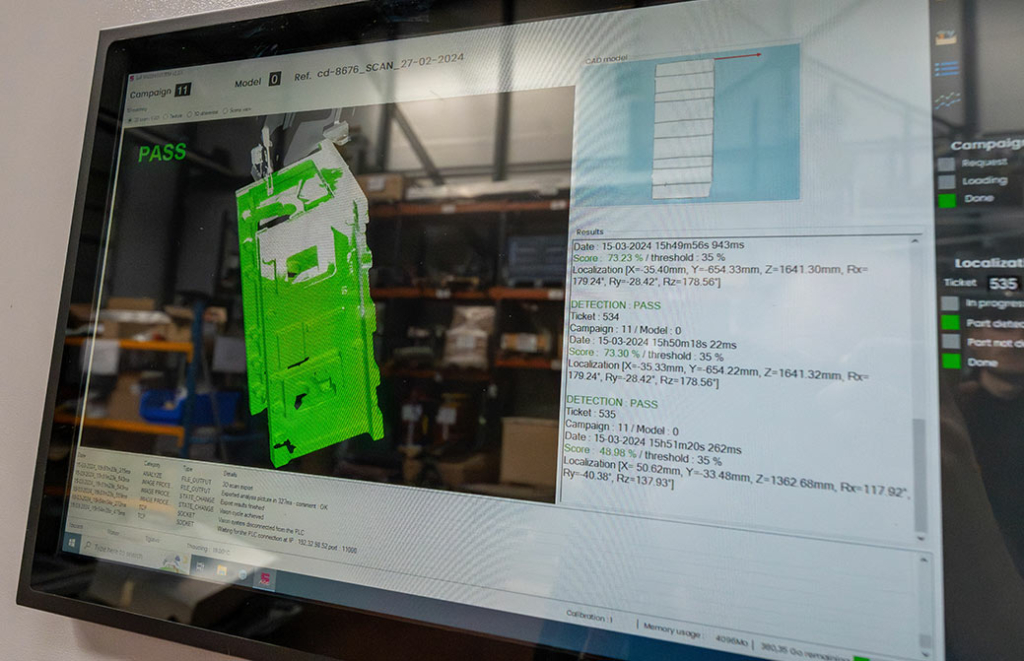
愿景
多亏了视觉系统 :
- 无需专门的装载支架即可拾取部件。
- 可检查零件的尺寸、质量等。
- 在同时进行多种生产的情况下,对零件进行位置控制。
合规打磨
尺寸变化、分型线缺陷和成型变化都是需要机器人调整轨迹的问题。
SiiF 在主轴或工件夹持器上开发的适应性可确保每个工件的精加工效果。

部件标识
质量体系的发展和对零件个性化跟踪的需求,使得使用纯文本(字母和数字)或Datamatrix标记变得越来越必要。
SiiF 可根据客户要求提供所有打标系统。

更换夹具
自动夹具耦合器可实现快速运动转换或同时生产多种类型的零件。
这种夹具耦合器可优化单元利用率。
刀具更换(全主轴或切削刀具)
自动工具更换可确保快速、安全地从一种工具更换到另一种工具,从而优化单元利用时间。
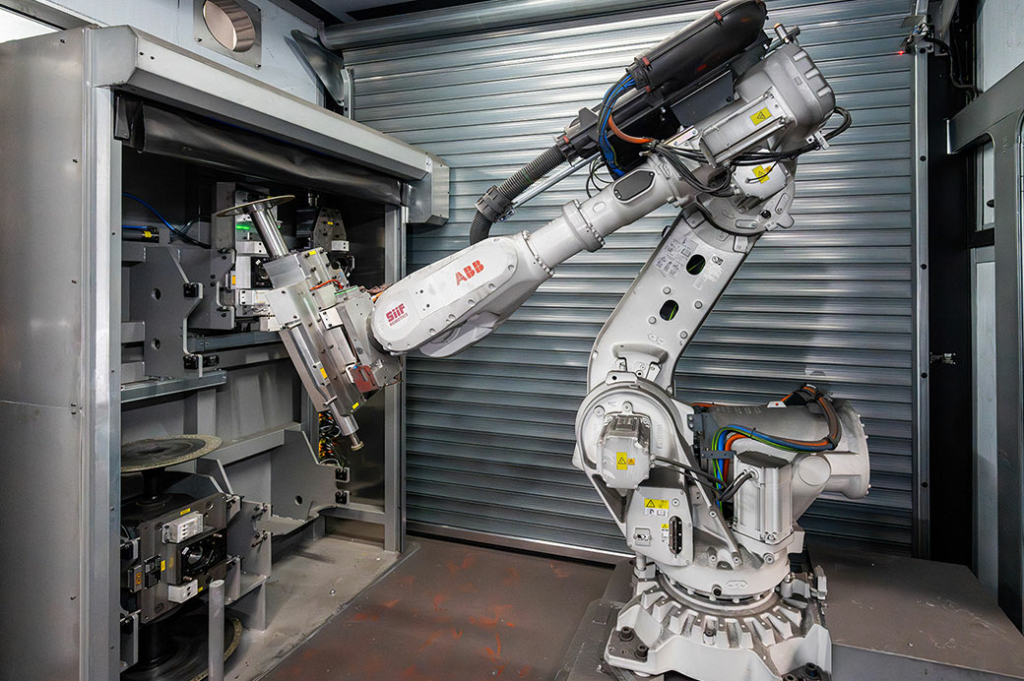
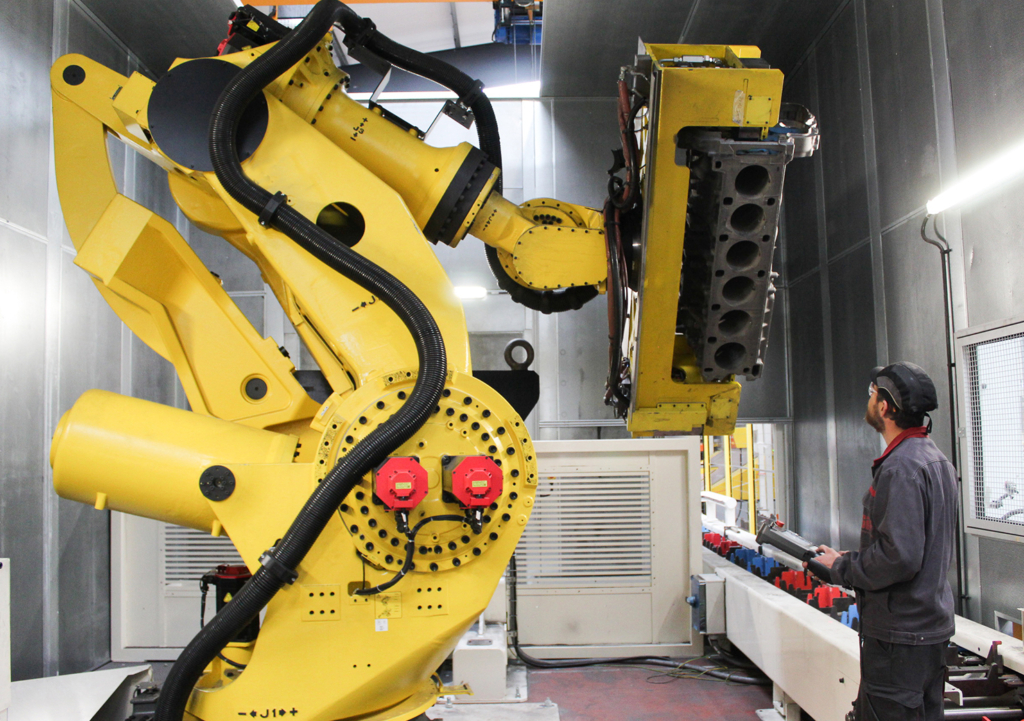
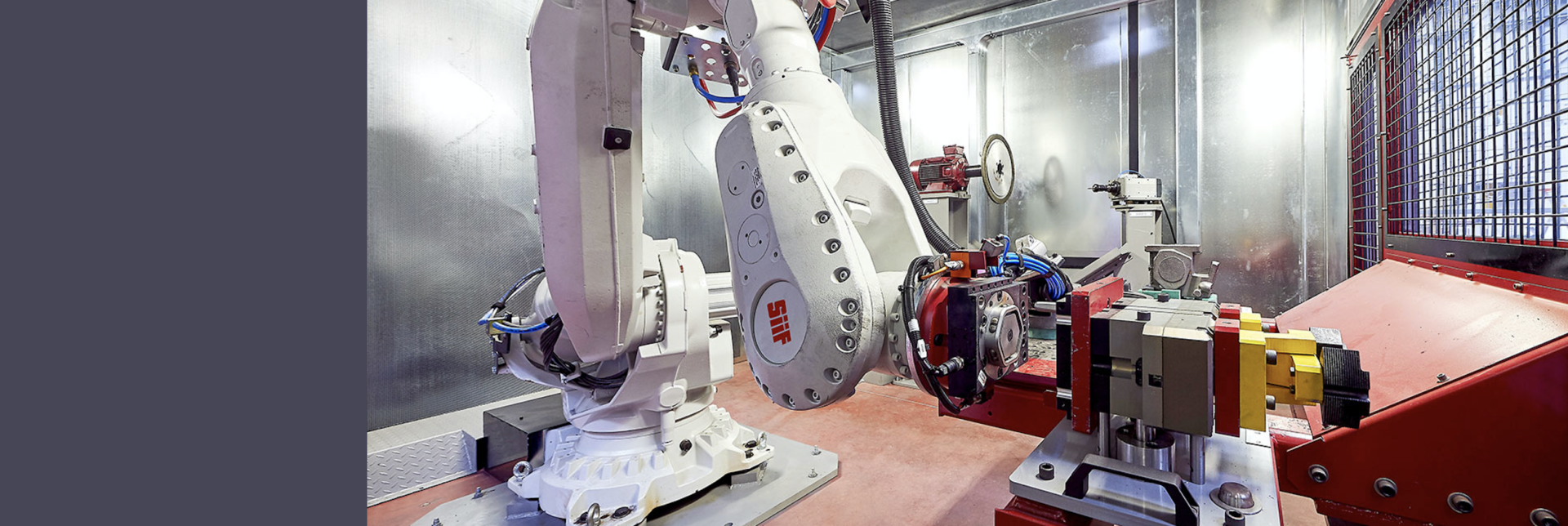
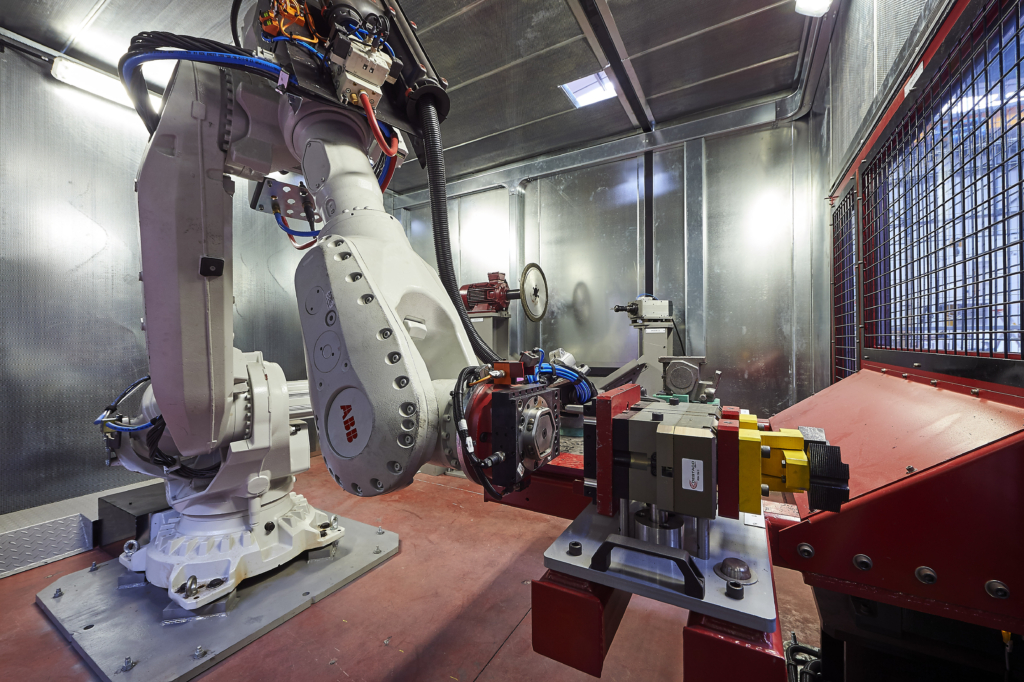
使用工具或工件
SiiF 开发了两种技术,将根据待加工零件的尺寸和重量加以应用:
- 对于大而重的零件,机器人将携带精加工工具。
对于大型、重型零件,机器人将携带精加工工具,将零件放置在旋转支架上,使需要精加工的区域暴露在机器人面前。
- 对于重量与机器人能力相符的中小型零件,将使用合适的夹具进行搬运,并由机器人将其放置在各种精加工工具上。