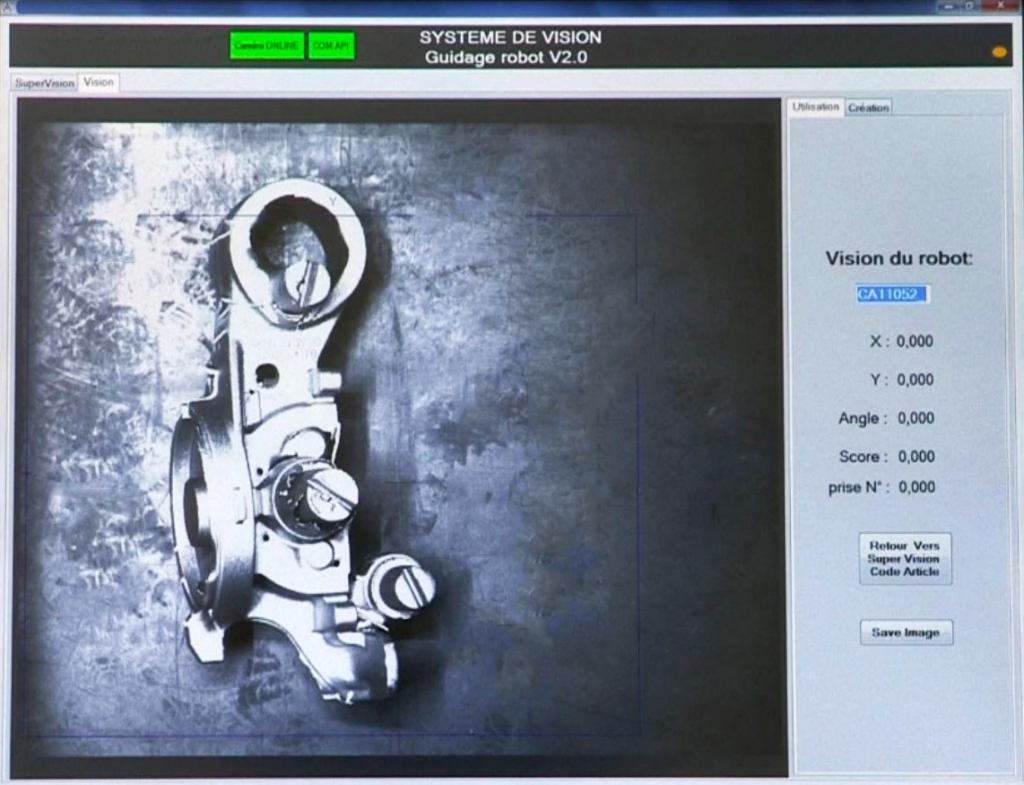
Vision > dank der Vision :
- Die Aufnahme der Teile kann ohne spezielle Aufnahmen erfolgen
- Eine gewisser Kontrollumfang der Teile kann durchgeführt werden (Abmessungen, Qualität, …)
- Positionskontrolle der Teile im Falle einer gleichzeitigen Mehrfachproduktion
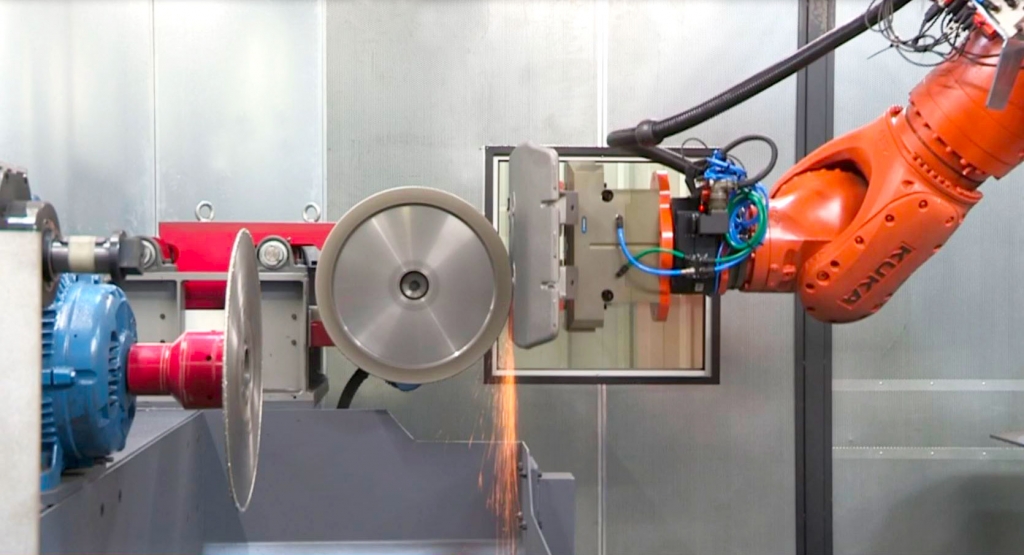
Schleifen mit Anpassung an die Gratgrösse
Massabweichungen, Fehler an den Kerntrennungen, Abweichungen bei der Formgebung sind Probleme, die eine Anpassung der Roboterfahrwege erfordern.
Die von SiiF entwickelten Ausgleichsfunktionen an den Spindeln oder an den Werkstückgreifern gewährleisten eine an jedes Werkstück angepasste Endbearbeitungsqualität.
Teileverfolgung durch Markierung
Die Entwicklung der Qualitätssysteme und die Notwendigkeit einer individuellen Verfolgung der Teile erfordern immer mehr die Verwendung von Markierungen, entweder in Klarschrift (Buchstaben und Zahlen) oder als Datamatrix.
SiiF bietet alle Markierungssysteme, gemäss den Spezifikationen der Kunden an.

Wechsel von Greifern
Die automatische Greiferkupplung ermöglicht das schnelle Umschalten von Produktionstypen oder die gleichzeitige Produktion mehrerer Arten von Teilen.
Diese Greiferkupplung ermöglicht somit die Optimierung der Zellenauslastung.
Werkzeugwechsel (Komplettspindel oder das Werkzeug)
Der automatische Werkzeugwechsel sorgt für ein schnelles und sicheres Umschalten von einem Werkzeug auf das andere und optimiert so die Nutzungszeit der Zellen.
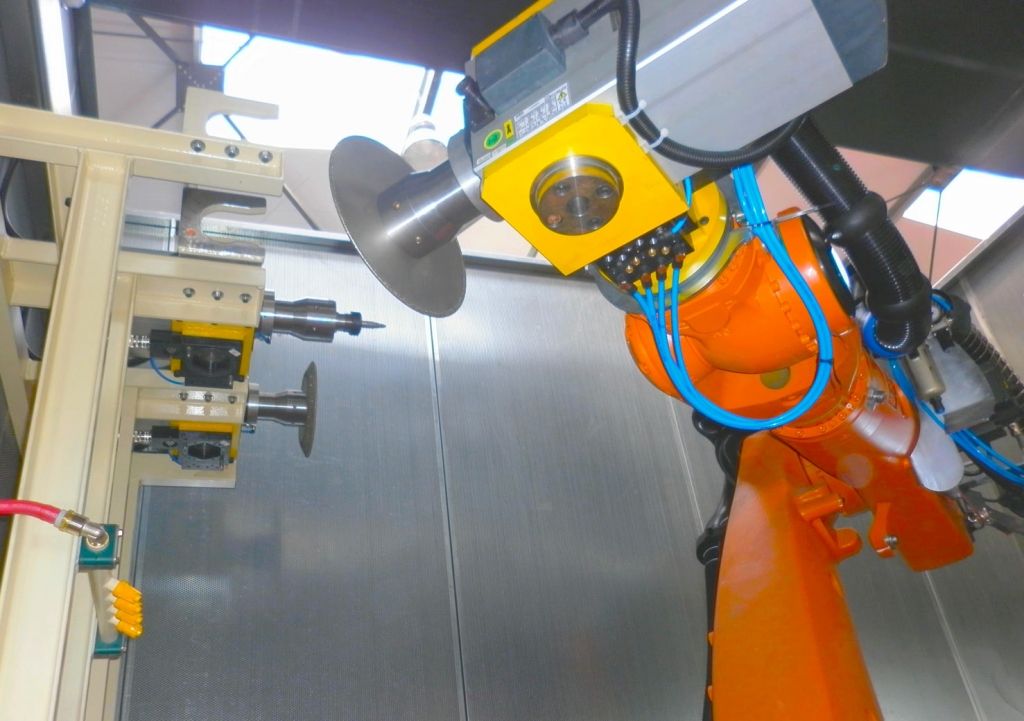
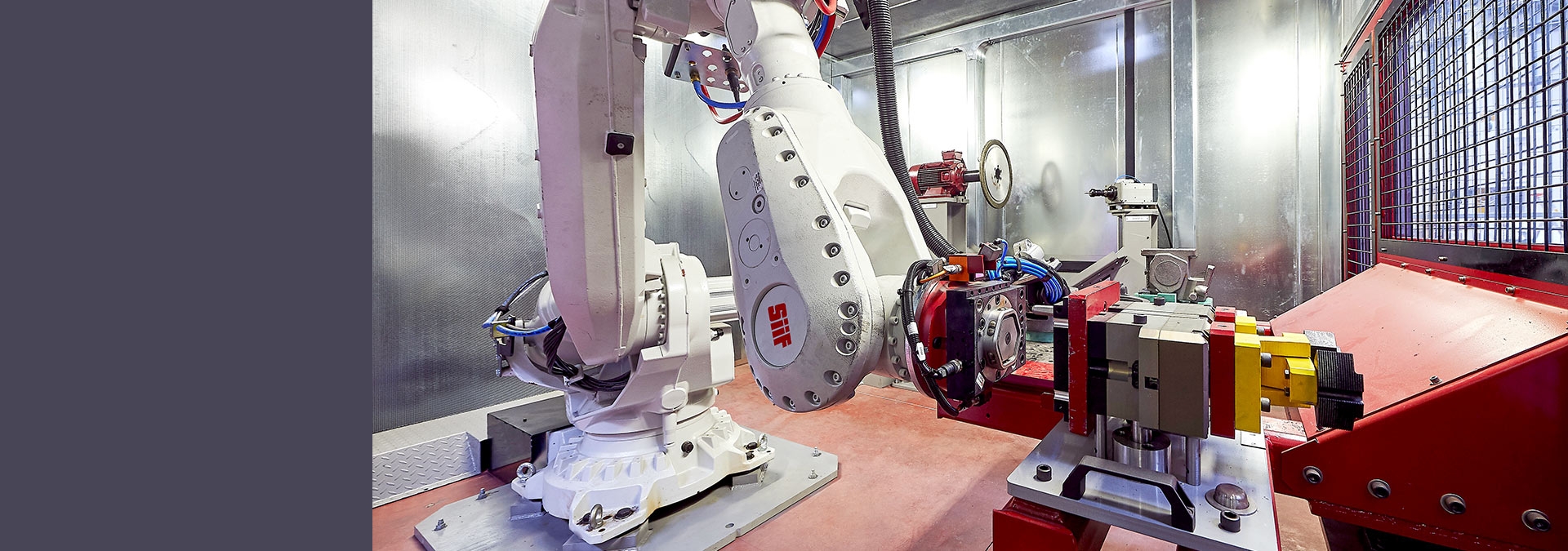
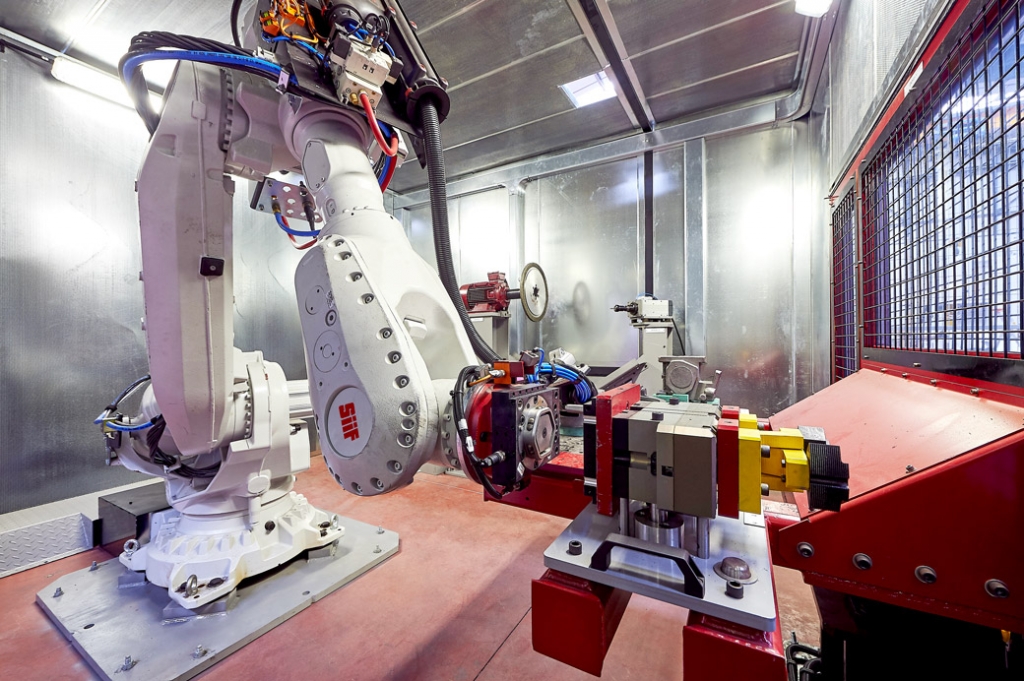
Arbeiten mit geführten Werkzeugen oder geführtem Werkstück
SiiF hat zwei Techniken entwickelt, die je nach Grösse und Gewicht der zu fertigenden Teile angewendet werden :
- Bei grossen Teilen mit hohem GEwicht wird der Roboter die Bearbeitungswerkzeuge führen
Die Teile werden auf Satellitentische platziert um die zu bearbeitenden Bereiche dem Roboter optimal zu präsentieren.
- Kleine und mittelgrosse Teile mit einem Gewicht, dem Payload der Roboter angepasst, werden dank eines geeignetem Greifers geführt und an den verschiedenen Endbearbeitungswerkzeugen positioniert
