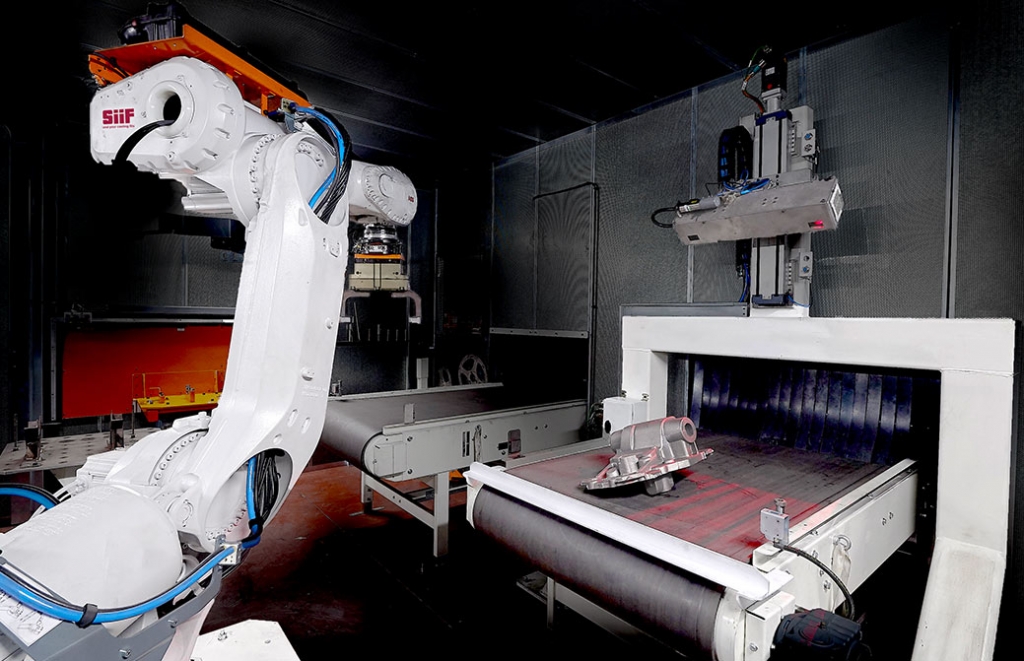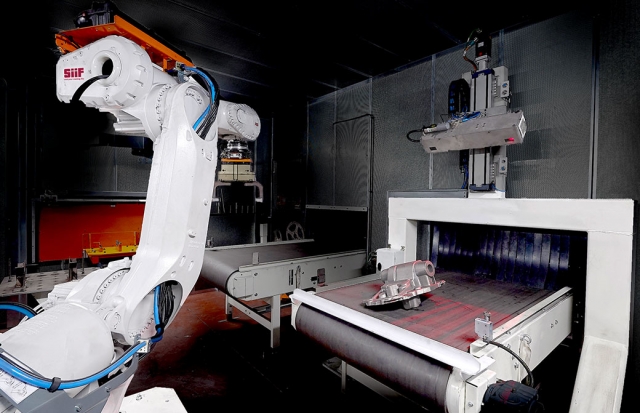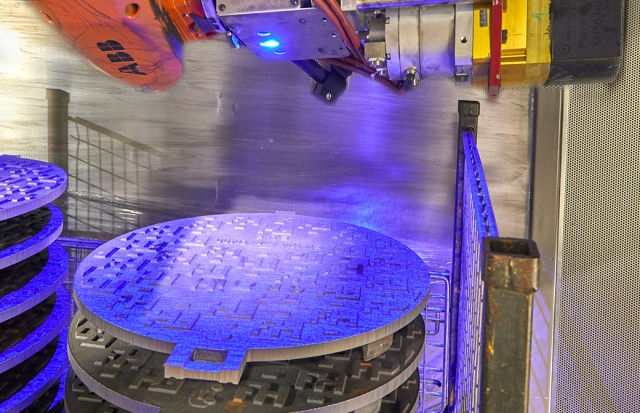
Teile Positionierung für Robotergreifer
- Statisches Teil mit 2D-Visionsystem, 3D-Triangulation (Scannen des Teils mit fester oder mobiler Kamera) und 3D-Stereoskopie
- Statisches Teil zur Entpalettierung mit 3D-Stereo-Sichtsystem
- Dynamisches Teil mit 2D-Bildverarbeitungssystem (bewegte Roboteraufnahme)
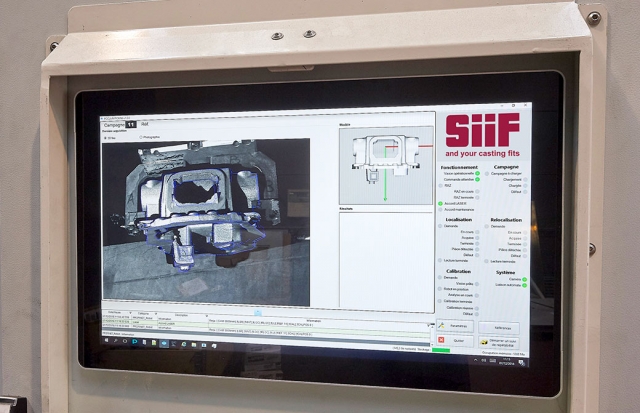
Einfache Kontrollen wie An- / Abwesenheit, Positionierung / Teileart, korrektes Auflegen, …
- 2D-3D Vision-Sensor
- 2D-Vision-System
Kontrolle durch Messen, Typ, Durchmesser, Abstand, Positionierung auf dem Teil, …
- Vision-Sensor für einfache Messungen
- 2D-3D Vision System
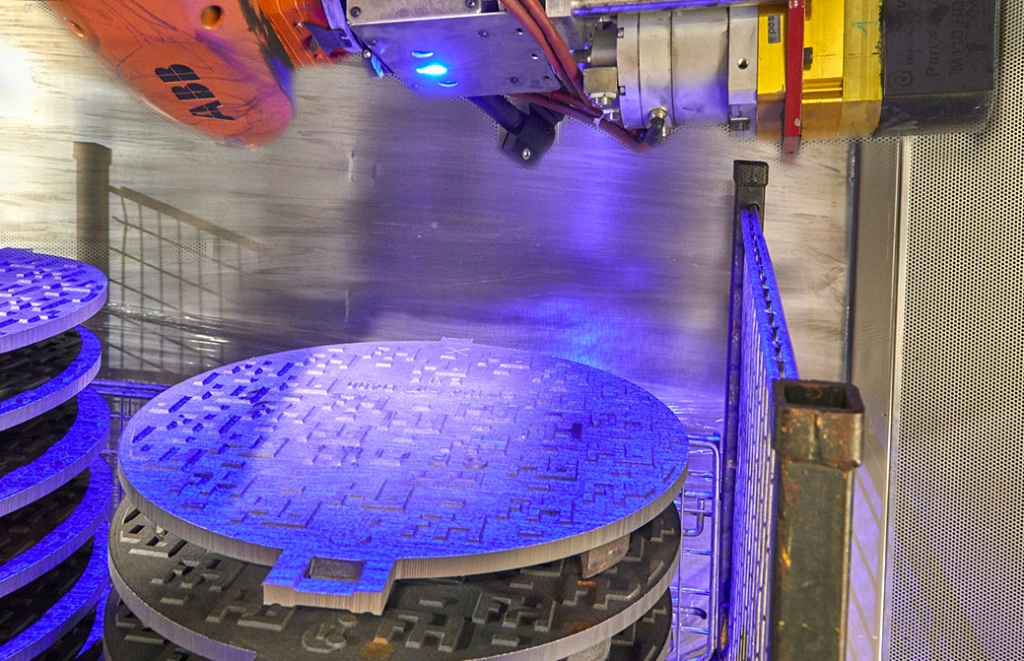
- Profilerkennung mit 3D-Rekonstruktionsoption
- Random Teileentladung aus Container mit 3D-Volumensensor : IFM
SiiF integriert : COGNEX, SICK, KEYENCE, ENSENSO (soft HALCON), IFM, …
Laden Sie das Produktdatenblatt herunter
SiiF Broschüre / Vision Systeme
1.23 MB
1.23 MB