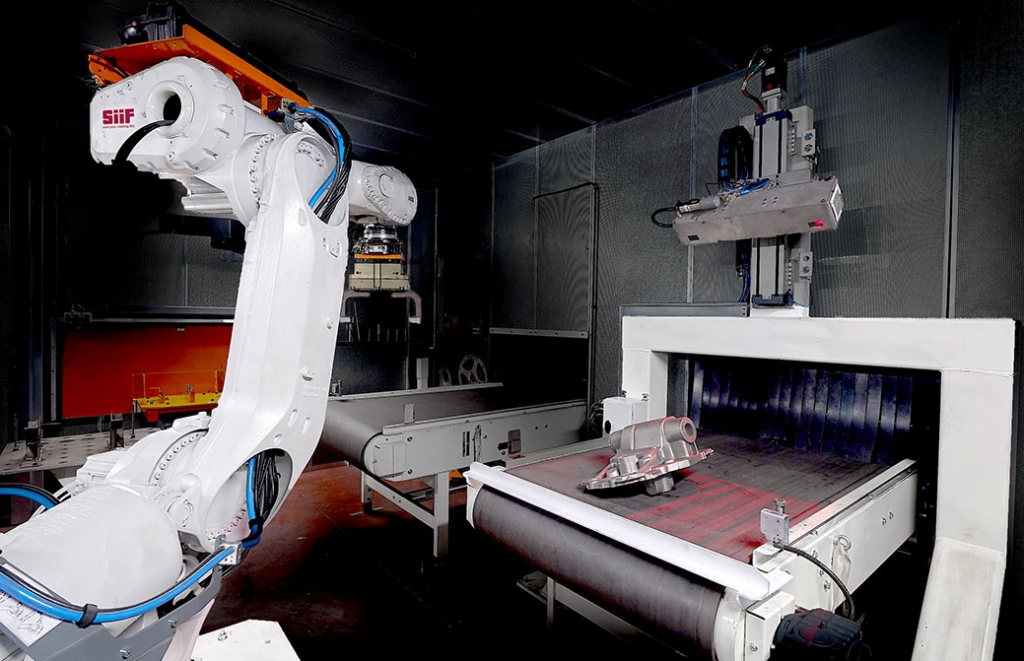
Lokalizacja dla robotów podnoszących
- Część statyczna z systemem wizyjnym 2D, triangulacją 3D (skanowanie części kamerą stałą lub ruchomą) i stereoskopią 3D
- Statyczny udział w depaletyzacji z wykorzystaniem stereoskopowego systemu wizyjnego 3D
- Część dynamiczna z systemem wizyjnym 2D (zrobotyzowane pobieranie przez śledzenie)
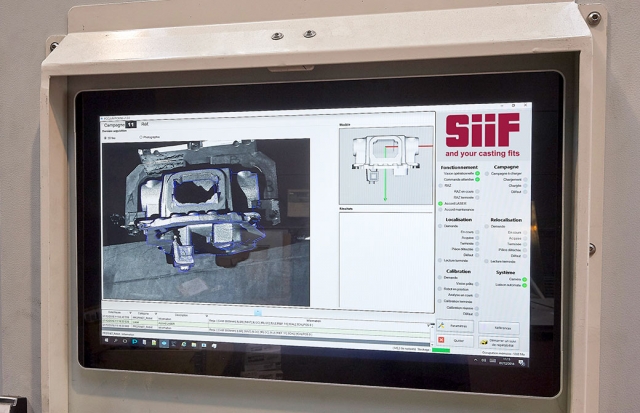
Prosta kontrola obecności/braku, referencji/typu odlewu, ułożenia, …
- Czujnik wizyjny 2D-3D
- System wizyjny 2D
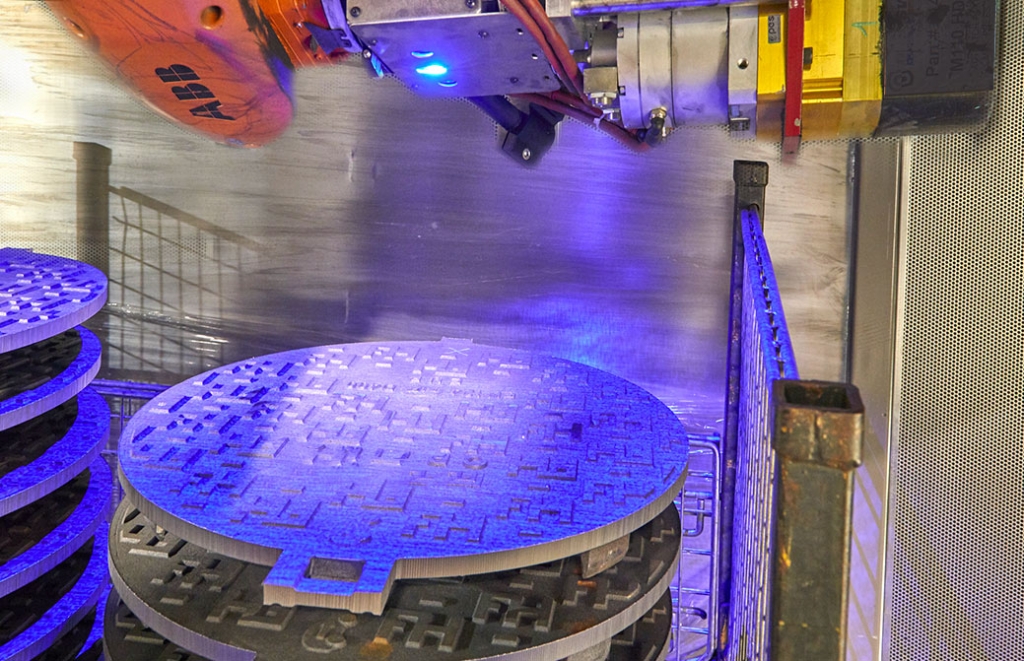
Kontrola za pomocą pomiarów takich jak średnica, odległość, pozycjonowanie na części, …
- Czujnik wizyjny do prostych pomiarów
- System wizyjny 2D-3D
- Profilometr z opcją rekonstrukcji 3D
- Usuwanie odpadów z czujnikiem objętości 3D: IFM
Zintegrowane SiiF: COGNEX, SICK, KEYENCE, ENSENSO (Program HALCON), IFM, …
Pobierz kartę produktu